
前言:关于A*算法的写法用法网上有很多教程,我这里只讲解我目前用到的写法。
一、算法流程介绍
1.写一个信息类
这个类的作用主要是用于保存算法地图中每个格子的信息。
public class Point
{
public Point parent { get; set; }//该格子的父节点
public Vector2 worldpos;//该格子在场景中的坐标
public int x;//算法中的x方向第几格
public int y;//算法中的y方向第几格
public float h;//该格子与父节点的距离
public float g;//该格子与目标点的距离
public float f;//h与g的综合,也是该格子在线路中的优先级
public bool isWall;//是否是障碍物,能不能通过
public Point(Vector2 worldpos, int x, int y, Point parent = null)
{
this.parent = parent;
this.worldpos = worldpos;
this.x = x;
this.y = y;
}
public void UpdateParent(Point parent, float g)
{
this.parent = parent;
this.g = g;
this.f = this.g + h;
}
}
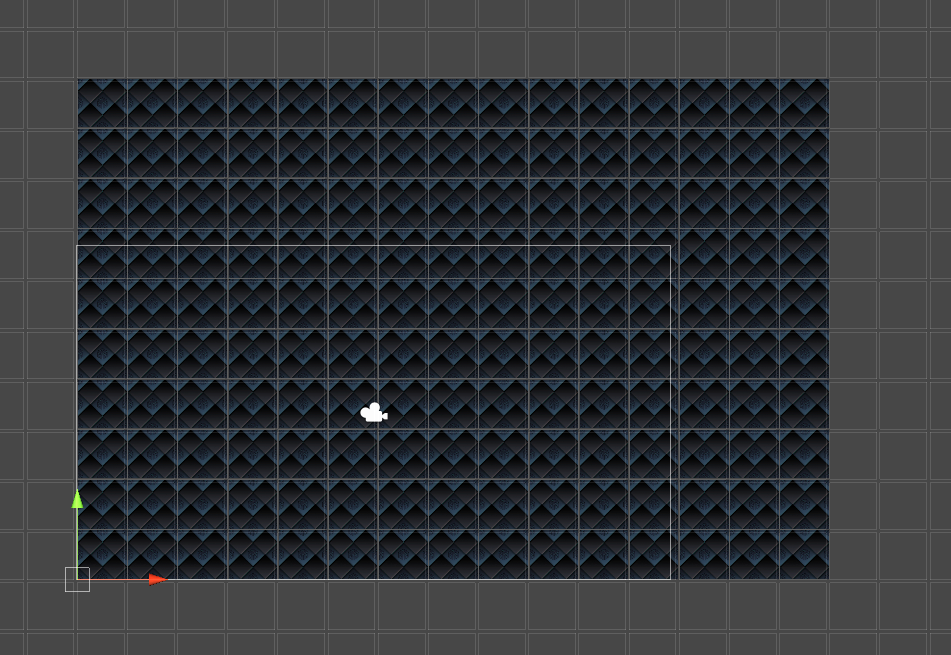
2.绘制算法地图
在A算法中首先要将我们在unity中用到的地图变换成算法中的数组。所以我们的第一步就是绘制算法地图,以确定哪些地方可以走,哪些地方是障碍物,不可以走。绘制地图要有一个起始原点,即图中摄像机的左下角(原点可以自定义位置,我的设定的绘制地图大小是1510,所以图中显示的方格数量是150个)。
3.确定起点和终点
在范例中我是直接将目前要移动的物体绑定为起点,终点可自己指定。

4.开始查找路径
1、我们要写两个列表,用于保存信息。
- 开启列表:
List<Point> openList = new List<Point>();待检查方格的集合列表,寻找周围可以达到的点,加入到此表中, 并保存中心点为父节点 - 关闭列表:
List<Point> closeList = new List<Point>();列表中保存不需要再次检查的方格 2、把起始点和终点的二维坐标转换到算法地图中的格子位置;
public Point GetIdem(Vector2 pos)
{
int i = Mathf.RoundToInt((pos.x - ((Vector2)meshOrigin.position).x) / lengthofbox);
int j = Mathf.RoundToInt((pos.y - ((Vector2)meshOrigin.position).y) / lengthofbox);
i = Mathf.Clamp(i, 0, mapWith - 1);
j = Mathf.Clamp(j, 0, mapHeight - 1);
return map[i, j];
}
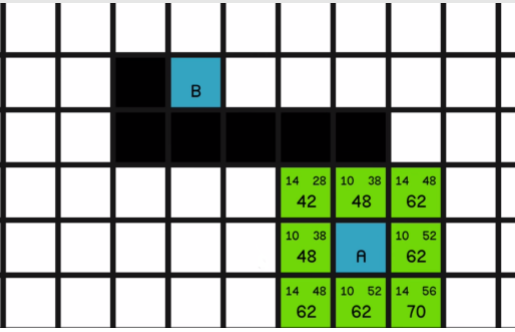
3、将起始位置添加到开启列表中。 4、开始循环。查找开启列表中F值最小的那个方格point(不知道F值是啥的看开头信息类代码)(如果是第一轮,此时开启列表内只有起始位置)
private Point FindMinFOfPoint(List<Point> openList)
{
float f = float.MaxValue;
Point temp = null;
foreach (Point p in openList)
{
if (p.f < f)
{
temp = p;
f = p.f;
}
}
//print("返回起始列表中最小的节点F:" + temp.f);
return temp;
}
5、如果point是终点就跳出循环,否则继续执行。
6、将point从开启列表中移除,并添加到关闭列表中。
7、写一个周围列表用于保存point周围的格子。
List<Point> surroundPoints = GetSurroundPoints(point);
/// <summary>
/// 获取当前节点周围的四个节点
/// </summary>
/// <param name="point"></param>
/// <returns></returns>
private List<Point> GetSurroundPoints(Point point)
{
//需要八个方向都可以走,将该方法中注释部分代码解开即可
Point up = null, down = null, left = null, right = null;
//Point lu = null, ru = null, ld = null, rd = null;
if (point.y < mapHeight - 1)
{
up = map[point.x, point.y + 1];
}
if (point.y > 0)
{
down = map[point.x, point.y - 1];
}
if (point.x > 0)
{
left = map[point.x - 1, point.y];
}
if (point.x < mapWith - 1)
{
right = map[point.x + 1, point.y];
}
//if (up != null && left != null)
//{
// lu = map[point.x - 1, point.y + 1];
//}
//if (up != null && right != null)
//{
// ru = map[point.x + 1, point.y + 1];
//}
//if (down != null && left != null)
//{
// ld = map[point.x - 1, point.y - 1];
//}
//if (down != null && right != null)
//{
// rd = map[point.x + 1, point.y - 1];
//}
List<Point> list = new List<Point>();
if (down != null && down.isWall == false)
{
list.Add(down);
}
if (left != null && left.isWall == false)
{
list.Add(left);
}
if (right != null && right.isWall == false)
{
list.Add(right);
}
if (up != null && up.isWall == false)
{
list.Add(up);
}
//if (lu != null && lu.isWall == false && left.isWall == false && up.isWall == false)
//{
// list.Add(lu);
//}
//if (ld != null && ld.isWall == false && left.isWall == false && down.isWall == false)
//{
// list.Add(ld);
//}
//if (ru != null && ru.isWall == false && right.isWall == false && up.isWall == false)
//{
// list.Add(ru);
//}
//if (rd != null && rd.isWall == false && right.isWall == false && down.isWall == false)
//{
// list.Add(rd);
//}
return list;
}
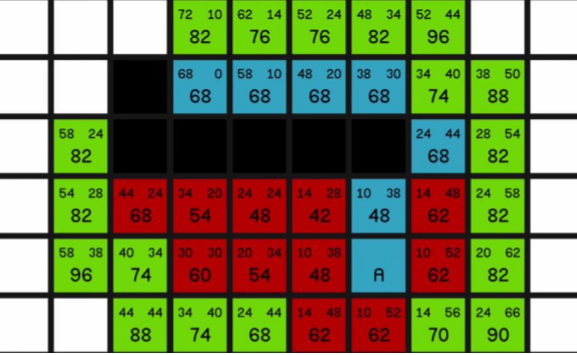
8、移除周围列表里面已经存在于关闭列表里的格子。

9、遍历周围列表
- 如果开启列表里存在周围列表里的格子,那么判断该格子是基于它的父节点优先级(f值)高一些,还是基于自己优先级高一些,如果基于自己优先级高一些则将它的父节点设为自己。
- 如果开启列表中不存在该格子的父节点设为自己,并计算它的f、h、g值,并添加到开启列表中
10、返回第4步循环,直到开启列表中没有格子为止。(地图全部走完) 如果此时还没有得到完整路径,说明无法到达终点(终点可能在障碍物中的情况)。
5.生成路径泛型队列
此时我们已经在关闭列表中找到了终点,那么我们根据终点的父节点一直向上找就可以找到一条完整的路径。
private List<Point> Generatepath(Point start, Point end)
{
List<Point> path = new List<Point>();
if (end != null)
{
Point node = end;//从终点开始生成路线
while (node != start)
{
path.Add(node);//将节点放入路径队列中
node = node.parent;//下一个节点为该节点的父节点
}
path.Reverse();//将路径节点倒序
}
//Debug.LogWarning(path.Count);
return path;
}
6.绘制路径
这里需要有LineRenderer组件
private void ShowPath()
{
int count = path.Count;
if (path.Count > 0)
{
pathline.positionCount = count;
for (int i = 0; i < count; i++)
{
pathline.SetPosition(i, path[i].worldpos);
}
}
else
{
pathline.positionCount = 0;
}
}
二、具体demo代码演示
- 这里由于我的demo里面对开启列表的数据结构进行了一些二叉堆优化,看不懂的同学自行去科普二叉堆。在控制人物移动方面可以把update里的按键操作代码取消注释,这样人物移动会跟精准。还有我的设定是如果障碍物周围有路面也可以到达,总而言之大家看着改吧。
using UnityEngine;
public class Point
{
public Point parent { get; set; }//该格子的父节点
public Vector2 worldpos;//该格子在场景中的坐标
public int x;//算法中的x方向第几格
public int y;//算法中的y方向第几格
public float h;//该格子与目标点的距离
public float g;//该格子与父节点的距离
public float f;//h与g的综合,也是该格子在线路中的优先级
public bool isWall;//是否是障碍物,能不能通过
public Point(Vector2 worldpos, int x, int y, Point parent = null)
{
this.parent = parent;
this.worldpos = worldpos;
this.x = x;
this.y = y;
}
public void UpdateParent(Point parent, float g)
{
this.parent = parent;
this.g = g;
this.f = this.g + h;
}
}
using System.Collections.Generic;
using UnityEngine;
public class Astar : MonoBehaviour
{
public static Astar instance;
public const int mapWith = 15;//地图的长
public const int mapHeight = 10;//地图的宽
private Point[,] map = new Point[mapWith, mapHeight];
public GameObject Ground;//地图不可行走格子的图片
public GameObject Way;//地图可行走格子的图片
[Range(0.5f, 1.5f)]
public float lengthofbox;//地图中每个格子大小,这个可以根据实际情况改
public LayerMask NodeLayer;//选择障碍物所在的层
public Transform meshOrigin;//网格地图起点对象
private void Awake()
{
instance = this;
for (int x = 0; x < mapWith; x++)
{
for (int y = 0; y < mapHeight; y++)
{
//从起始点meshOrigin开始绘制网格
Vector2 pos = new Vector2(x * lengthofbox, y * lengthofbox) + (Vector2)meshOrigin.position;
//绘制可视化地面背景
GameObject gameObject = Instantiate(Ground);
gameObject.transform.position = new Vector3(pos.x, pos.y, 100);
gameObject.transform.SetParent(GameObject.Find("Ground").transform);
//方形范围检测(这里如果判断我将能检测到的方形碰撞盒的地方设为可行走路面,如果想改为障碍将感叹号去掉即可)
bool iswall = !Physics2D.BoxCast(pos, new Vector2(lengthofbox, lengthofbox), 0, new Vector2(0, 0), NodeLayer);
map[x, y] = new Point(pos, x, y);
map[x, y].isWall = iswall;
}
}
}
/// <summary>
/// 绘制算法地图
/// </summary>
private void InitMap()
{
for (int x = 0; x < mapWith; x++)
{
for (int y = 0; y < mapHeight; y++)
{
//从起始点meshOrigin开始绘制网格
Vector2 pos = new Vector2(x * lengthofbox, y * lengthofbox) + (Vector2)meshOrigin.position;
//方形范围检测(这里如果判断我将能检测到的方形碰撞盒的地方设为可行走路面,如果想改为障碍将感叹号去掉即可)
bool iswall = !Physics2D.BoxCast(pos, new Vector2(lengthofbox, lengthofbox), 0, new Vector2(0, 0), NodeLayer);
map[x, y] = new Point(pos, x, y);
map[x, y].isWall = iswall;
}
}
}
/// <summary>
/// 二叉堆添加
/// </summary>
/// <param name="openList"></param>
/// <param name="point"></param>
private void AddPoint(List<Point> openList, Point point)
{
openList.Add(point);
int last = openList.Count - 1;
while (last >= 1)
{
int half = last >> 1;
if (openList[last].f >= openList[half].f)
{
break;
}
Point temporary = openList[last];
openList[last] = openList[half];
openList[half] = temporary;
last >>= 1;
}
}
/// <summary>
/// 二叉堆删除
/// </summary>
/// <param name="openList"></param>
/// <param name="point"></param>
private void RemovePoint(List<Point> openList, Point point)
{
int last = openList.Count;
int head = openList.IndexOf(point) + 1;//防止索引为零,必须+1
while ((head << 1) + 1 <= last)
{
int child1 = head << 1;
int child2 = child1 + 1;
int childMin = openList[child1 - 1].f < openList[child2 - 1].f ? child1 : child2;
openList[head - 1] = openList[childMin - 1];
head = childMin;
}
openList.Remove(openList[head - 1]);
}
/// <summary>
/// 查找最优路径
/// </summary>
/// <param name="start">起点</param>
/// <param name="end">终点</param>
public List<Point> FindPath(Vector2 startPos, Vector2 endPos)
{
Point start = GetIdem(startPos);
Point end = GetIdem(endPos);
//Debug.LogWarning("起点算法坐标"+start.x + "+" + start.y);
//Debug.LogWarning("终点算法坐标"+end.x + "+" + end.y);
List<Point> openList = new List<Point>();
List<Point> closeList = new List<Point>();
AddPoint(openList, start);//将起始位置添加到Open列表
//终点在路面上的情况
while (openList.Count > 0)
{
Point point = openList[0];//获取开启列表中F值最小的格子,
if (point == end)
{
return Generatepath(start, end);
}
RemovePoint(openList, point);
closeList.Add(point);
//四周节点列表
List<Point> surroundPoints = GetSurroundPoints(point);
PointsFilter(surroundPoints, closeList);
foreach (Point surroundPoint in surroundPoints)
{
if (openList.IndexOf(surroundPoint) > -1)//如果周围节点在起始列表中
{
// 计算经过的Open列表中最小f值到周围节点的G值
float nowG = CalcG(surroundPoint, surroundPoint.parent);
if (nowG < surroundPoint.g)
{
surroundPoint.UpdateParent(point, nowG);
}
}
else
{
surroundPoint.parent = point;//设置周围列表的父节点
CalcF(surroundPoint, end);//计算周围节点的F,G,H值
AddPoint(openList, surroundPoint); //最后将周围节点添加进Open列表
}
}
}
//终点在障碍物上,且障碍物周围至少有一格为路面的情况
List<Point> endSurroundPoints = GetSurroundPoints(end);//终点周围格子
Point optimal = null;//最优点
foreach (Point surroundPoint in endSurroundPoints)
{
if (closeList.IndexOf(surroundPoint) > -1)
{
if (optimal != null)
{
if (surroundPoint.g < optimal.g)
optimal = surroundPoint;
}
else
{
optimal = surroundPoint;
}
}
}
if (optimal != null)
{
return Generatepath(start, optimal);
}
//终点在障碍物上,无法到达
Debug.LogWarning("找不到路径");
return Generatepath(start, null);
}
/// <summary>
/// 获取坐标点在算法地图中的坐标
/// </summary>
/// <param name="pos"></param>
/// <returns></returns>
public Point GetIdem(Vector2 pos)
{
int i = Mathf.RoundToInt((pos.x - ((Vector2)meshOrigin.position).x) / lengthofbox);
int j = Mathf.RoundToInt((pos.y - ((Vector2)meshOrigin.position).y) / lengthofbox);
i = Mathf.Clamp(i, 0, mapWith - 1);
j = Mathf.Clamp(j, 0, mapHeight - 1);
return map[i, j];
}
/// <summary>
/// 获取当前节点周围的四个节点
/// </summary>
/// <param name="point"></param>
/// <returns></returns>
private List<Point> GetSurroundPoints(Point point)
{
//需要八个方向都可以走,将该方法中注释部分代码解开即可
Point up = null, down = null, left = null, right = null;
//Point lu = null, ru = null, ld = null, rd = null;
if (point.y < mapHeight - 1)
{
up = map[point.x, point.y + 1];
}
if (point.y > 0)
{
down = map[point.x, point.y - 1];
}
if (point.x > 0)
{
left = map[point.x - 1, point.y];
}
if (point.x < mapWith - 1)
{
right = map[point.x + 1, point.y];
}
//if (up != null && left != null)
//{
// lu = map[point.x - 1, point.y + 1];
//}
//if (up != null && right != null)
//{
// ru = map[point.x + 1, point.y + 1];
//}
//if (down != null && left != null)
//{
// ld = map[point.x - 1, point.y - 1];
//}
//if (down != null && right != null)
//{
// rd = map[point.x + 1, point.y - 1];
//}
List<Point> list = new List<Point>();
if (down != null && down.isWall == false)
{
list.Add(down);
}
if (left != null && left.isWall == false)
{
list.Add(left);
}
if (right != null && right.isWall == false)
{
list.Add(right);
}
if (up != null && up.isWall == false)
{
list.Add(up);
}
//if (lu != null && lu.isWall == false && left.isWall == false && up.isWall == false)
//{
// list.Add(lu);
//}
//if (ld != null && ld.isWall == false && left.isWall == false && down.isWall == false)
//{
// list.Add(ld);
//}
//if (ru != null && ru.isWall == false && right.isWall == false && up.isWall == false)
//{
// list.Add(ru);
//}
//if (rd != null && rd.isWall == false && right.isWall == false && down.isWall == false)
//{
// list.Add(rd);
//}
return list;
}
/// <summary>
/// 将关闭列表中已经存在的节点从周围节点中移除
/// </summary>
/// <param name="surroundPoints">四周节点列表</param>
/// <param name="closeList">关闭列表</param>
private void PointsFilter(List<Point> surroundPoints, List<Point> closeList)
{
foreach (Point p in closeList)
{
if (surroundPoints.IndexOf(p) > -1)
{
surroundPoints.Remove(p);
}
}
}
/// <summary>
/// 计算经过起始列表中最小f值到周围节点的G值
/// </summary>
/// <param name="surroundPoint"></param>
/// <param name="parent"></param>
/// <returns></returns>
private float CalcG(Point surroundPoint, Point parent)
{
return Vector2.Distance(new Vector2(surroundPoint.x, surroundPoint.y), new Vector2(parent.x, parent.y)) + parent.g;
}
/// <summary>
/// 计算周围节点的F,G,H值
/// </summary>
/// <param name="surroundPoint"></param>
/// <param name="end"></param>
private void CalcF(Point surroundPoint, Point end)
{
//F = G + H
float h = Mathf.Abs(end.x - surroundPoint.x) + Mathf.Abs(end.y - surroundPoint.y);
float g = 0;
if (surroundPoint.parent == null)
{
g = 0;
}
else
{
g = Vector2.Distance(new Vector2(surroundPoint.x, surroundPoint.y), new Vector2(surroundPoint.parent.x, surroundPoint.parent.y)) + surroundPoint.parent.g;
}
float f = g + h;
surroundPoint.f = f;
surroundPoint.g = g;
surroundPoint.h = h;
}
/// <summary>
/// 生成路径泛型队列
/// </summary>
/// <param name="start"></param>
/// <param name="end"></param>
private List<Point> Generatepath(Point start, Point end)
{
List<Point> path = new List<Point>();
if (end != null)
{
Point node = end;//从终点开始生成路线
while (node != start)
{
path.Add(node);//将节点放入路径队列中
node = node.parent;//下一个节点为该节点的父节点
}
path.Reverse();//将路径节点倒序
}
//Debug.LogWarning(path.Count);
return path;
}
private void Update()
{
//当地图发生改变后重新绘制算法地图
if (Input.GetKeyDown(KeyCode.Q))
{
InitMap();
}
}
}
using System.Collections.Generic;
using UnityEngine;
public class Move : MonoBehaviour
{
[Range(0.5f, 3f)]
public float speed = 1.5f;//移动速度
public GameObject end;//终点
private LineRenderer pathline;//给对象添加LineRenderer组件
[Range(0.1f, 2f)]
public float lineWidth = 0.2f;//线宽
private int order = 0;//路径队列中当前坐标序号
private List<Point> path = new List<Point>();//路径
private Vector3 vector3;//移动方向
void Start()
{
//路径绘画初始化
pathline = gameObject.GetComponent<LineRenderer>();
pathline.startWidth = lineWidth;
pathline.endWidth = lineWidth;
}
void Update()
{
//if (Input.GetKeyDown(KeyCode.W))
{
path.Clear();
order = 0;
//获取路径
path = new List<Point>(Astar.instance.FindPath(gameObject.transform.position, end.transform.position));
//计算初始行走方向
if (path.Count > 0)
vector3 = new Vector3(path[order].worldpos.x, path[order].worldpos.y, path[order].worldpos.y) - gameObject.transform.position;
Debug.LogWarning(gameObject.name + ";" + path.Count);
ShowPath();
}
//开始移动
Run();
}
private void Run()
{
if (path.Count > 0)
{
//开始向下个路径点位移
gameObject.transform.position += vector3.normalized * speed * Time.deltaTime;
//如果到达下一个路径点
if (Vector3.Distance(new Vector3(path[order].worldpos.x, path[order].worldpos.y, path[order].worldpos.y), gameObject.transform.position) <= 0.1f)
{
print(gameObject.name + ":" + path[order].f + ";" + order + "; " + path[order].worldpos);
order++;
//如果没有下个路径点了
if (path.Count <= order)
{
path.Clear();
order = 0;
}
else
{
//计算下个路径点行走方向
vector3 = new Vector3(path[order].worldpos.x, path[order].worldpos.y, path[order].worldpos.y) - gameObject.transform.position;
}
}
}
}
/// <summary>
/// 绘制路径
/// </summary>
private void ShowPath()
{
int count = path.Count;
if (path.Count > 0)
{
pathline.positionCount = count;
for (int i = 0; i < count; i++)
{
pathline.SetPosition(i, path[i].worldpos);
}
}
else
{
pathline.positionCount = 0;
}
}
}